工业机器人 智能制造的核心基石与机器人驱动舵轮的关键作用

在当今全球制造业转型升级的浪潮中,智能制造已成为主导未来的关键方向。而工业机器人,作为这一宏大体系中最具代表性的物理实体与执行单元,被普遍认为是实现智能制造不可或缺的基础。要深入理解这一论断,我们需要从工业机器人在智能制造生态系统中的核心地位、其自身的技术演进,以及像‘机器人驱动舵轮’这样的关键部件所扮演的角色来综合审视。
工业机器人是智能制造物理层与信息层融合的枢纽。智能制造的愿景在于实现生产全流程的数字化、网络化和智能化。它不仅仅依赖于上层的ERP、MES等信息系统,更离不开底层能够精准、灵活执行指令的物理设备。工业机器人正是这样的设备:它通过接收来自数字孪生、物联网平台或人工智能算法的指令,将虚拟世界的生产计划转化为现实世界中的抓取、焊接、装配、喷涂等具体动作。没有工业机器人作为高效、可靠的执行终端,智能制造的决策与优化将停留在“纸上谈兵”的阶段。因此,它是连接信息域与物理域,实现“数据驱动制造”的桥梁与基石。
工业机器人的技术特性直接赋能了智能制造的核心诉求。智能制造追求柔性化生产,以应对小批量、多品种的市场需求。传统专机设备功能固定、改造困难,而多关节工业机器人凭借其可编程性和工作空间大的特点,能够通过快速更换末端执行器(如夹爪、焊枪)和重新编程,迅速适应新的生产任务。这种与生俱来的柔性,正是构建智能柔性产线、实现大规模定制的基础。随着视觉、力觉等传感技术的集成,机器人变得更具“智能”,能够完成更复杂的自适应作业,如精密装配、瑕疵检测,从而提升生产质量与效率,这正是智能制造价值体现的关键环节。
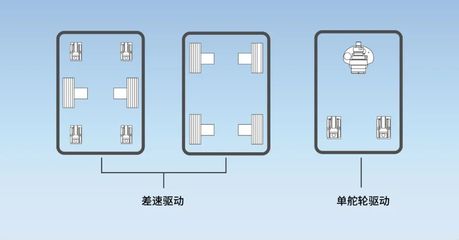
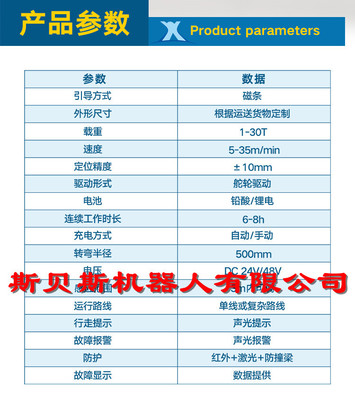
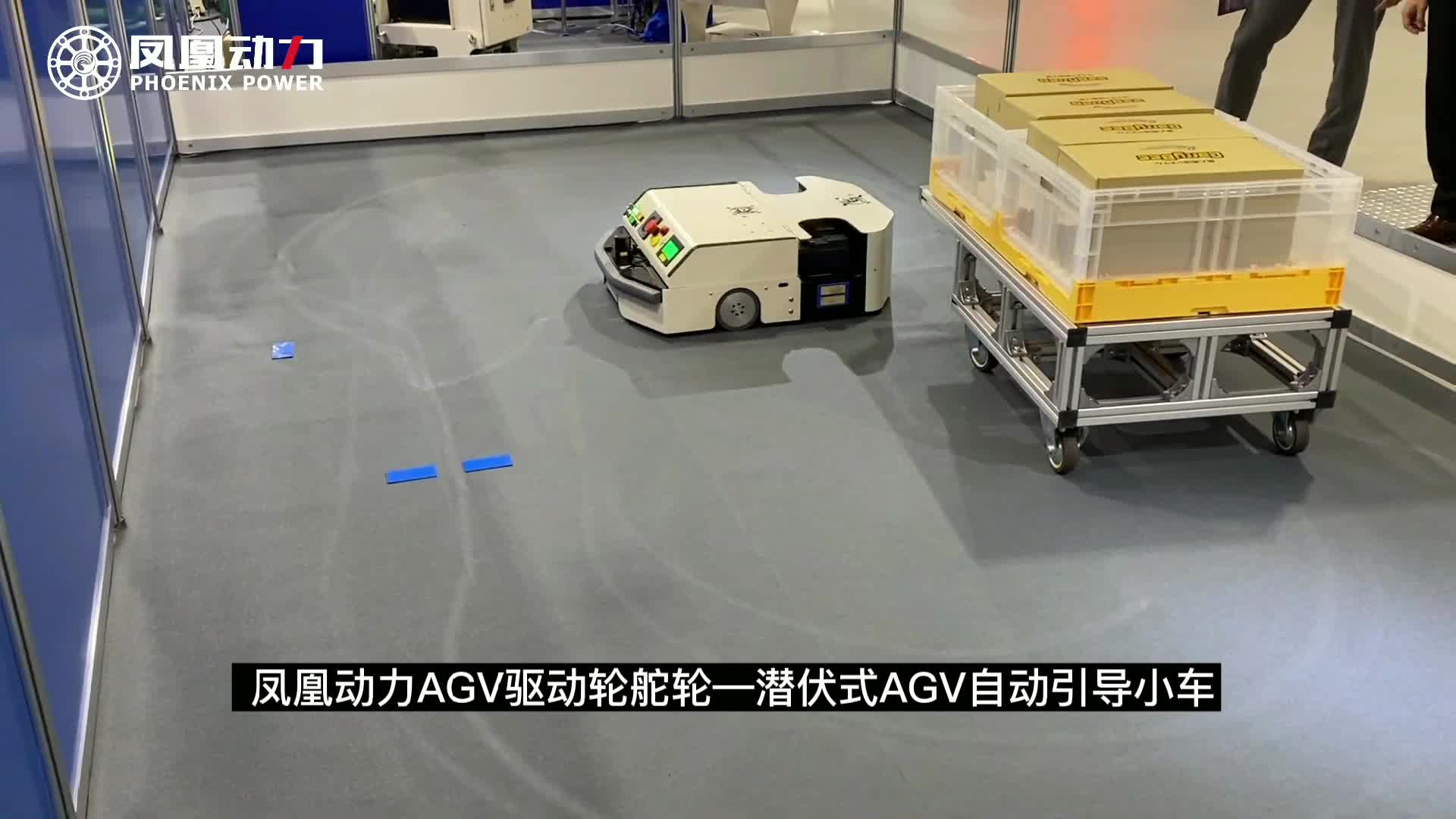
聚焦到机器人本体的关键组成部分,如“机器人驱动舵轮”,我们能更微观地理解其作为基础元件的重要性。驱动舵轮(通常指集成驱动电机、减速器、轮子及转向机构的一体化模块)是移动机器人(AGV/AMR)和某些大型重载工业机器人的核心运动部件。在智能工厂的物流体系中,AGV/AMR如同流动的血液,负责物料、半成品和成品的自动搬运与配送。驱动舵轮的性能直接决定了移动机器人的运动精度、承载能力、灵活性及可靠性。
一个高性能的驱动舵轮,能够实现精确的定位导航(配合激光SLAM或视觉导航)、平稳的启停与灵活的零半径转向,从而确保物料在复杂动态的工厂环境中准时、准确、无碰撞地送达指定工位。这无缝衔接了各个离散的自动化岛(如由固定工业机器人值守的加工站、装配站),形成了从仓储到生产线、再到产线的完整自动化物流闭环。可以说,没有可靠先进的驱动舵轮技术,智能工厂内部的物流智能化就难以实现,整个制造流程的连贯性与效率便会大打折扣,工业机器人的应用效益也无法最大化。
驱动舵轮的技术发展也反映了工业机器人乃至智能制造系统的演进趋势:高度集成化、模块化与智能化。现代驱动舵轮将动力、传动、控制与传感融为一体,通过标准接口便于集成和维护,这降低了移动机器人本体的开发门槛,促进了生态的繁荣。其内部嵌入的智能控制算法,能更好地协同多轮运动,适应复杂地形,这正体现了执行部件本身也在向智能化迈进。
工业机器人之所以被称为智能制造的基础,是因为它构成了智能工厂的“手”与“脚”,是执行智能决策、实现柔性生产、提升品质效率的核心物理载体。而像机器人驱动舵轮这样的关键基础部件,则是确保机器人,特别是移动机器人,能够精准、可靠、灵活地履行其职责的根本。它们共同构成了智能制造大厦坚实的地基,支撑起数据流动、虚实融合、高效协同的现代化生产模式。随着人工智能、5G、数字孪生等技术与工业机器人更深度的融合,这一基石的作用将愈发凸显,持续推动制造业向更高水平的智能化迈进。
如若转载,请注明出处:http://www.hfzhilun.com/product/14.html
更新时间:2026-06-18 16:02:58