机器人控制器与机器人驱动舵轮 智能移动的核心协同

在自动化与智能化浪潮席卷全球的今天,机器人正日益成为工业制造、仓储物流乃至服务领域的关键角色。而驱动机器人实现精准、灵活移动的核心硬件,正是机器人控制器与机器人驱动舵轮。这两者如同机器人的“大脑”与“强健的双腿”,共同构成了现代移动机器人(如AGV/AMR)的运动控制中枢,是实现复杂任务和智能导航的基石。
一、 机器人控制器:运动的“智慧大脑”
机器人控制器是机器人系统的指挥中心,本质上是一台高性能的专用计算机。它负责处理来自各类传感器(如激光雷达、视觉摄像头、惯性测量单元IMU)的海量数据,运行先进的导航算法(如SLAM)、路径规划算法和任务调度程序。
- 核心功能:
- 决策与规划:根据上层指令或自主感知的环境信息,规划出从起点到目标点的最优或可行路径。
- 运动解算与控制:将规划出的路径转化为具体的运动指令,例如控制每个驱动轮的速度、转向角度和加速度。对于舵轮系统,这涉及到复杂的运动学正逆解算。
- 多任务协调:协调机器人的移动、避障、充电、与上位系统(如WMS、MES)通信等多种任务。
- 安全监控:实时监控系统状态,处理紧急情况(如急停、碰撞检测),确保运行安全。
- 技术趋势:随着AI与边缘计算的发展,现代机器人控制器正朝着更开放(基于ROS等系统)、更集成(融合视觉、力控等多模态感知)、算力更强(搭载GPU或专用AI芯片)的方向演进,以实现更高阶的自主决策和自适应能力。
二、 机器人驱动舵轮:精准的“执行双腿”
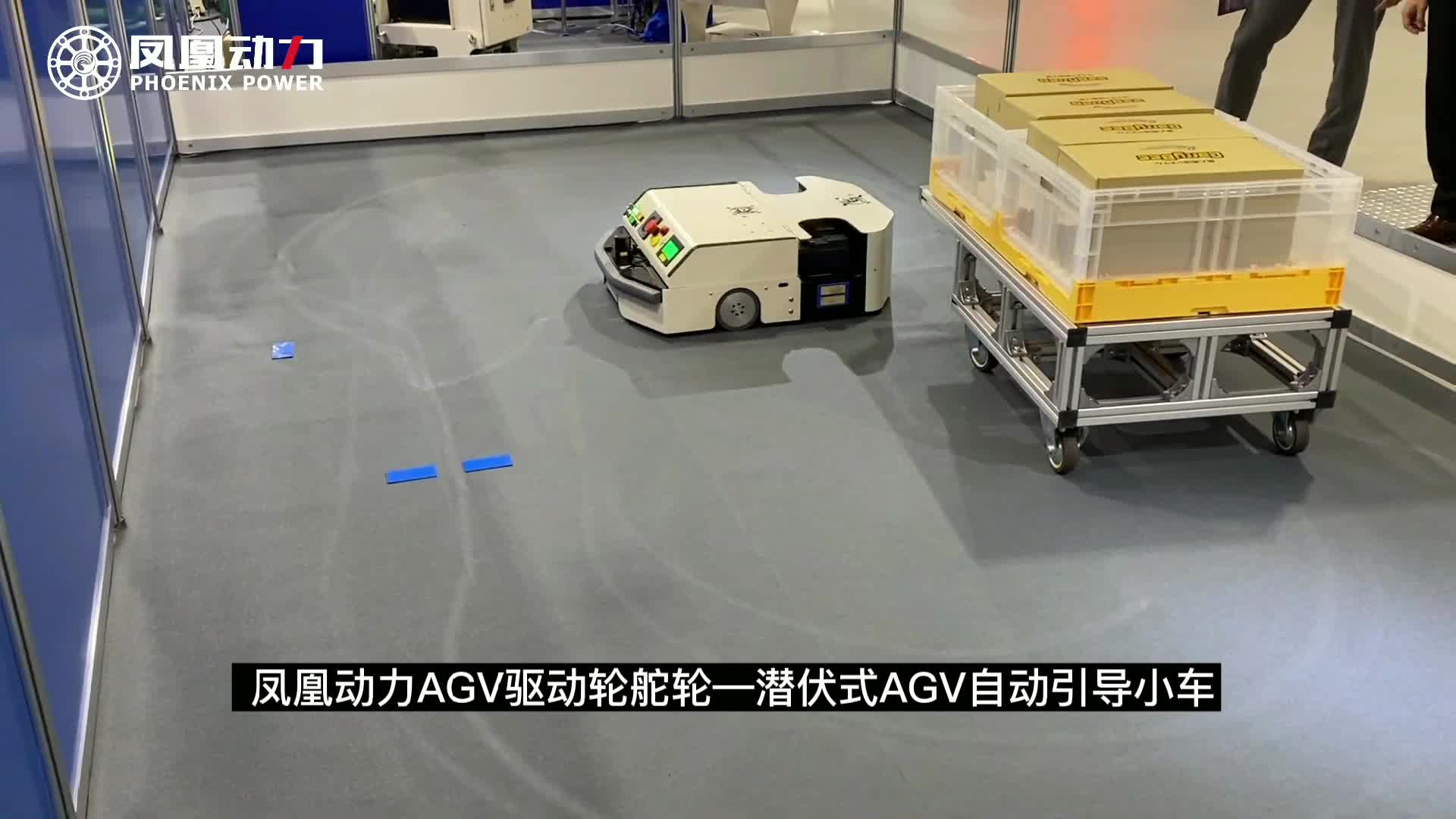
驱动舵轮,又称“舵轮模组”或“驱动转向一体化轮”,是集驱动(提供前进动力)、转向(控制行进方向)和承载功能于一体的精密机电装置。它是移动机器人实现全向移动(如前后直行、横向平移、原地旋转)的关键执行部件。
- 核心结构与类型:
- 一个典型的驱动舵轮通常包含:驱动电机(提供扭矩)、减速机(放大扭矩)、转向电机(控制轮子角度)、高精度编码器(反馈轮速和转角)、制动器以及承载轮体。
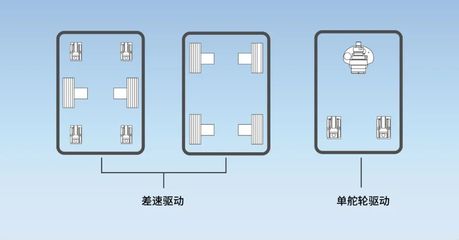
- 主要类型包括:差速舵轮(两个独立驱动的固定轮组合实现转向)、麦克纳姆轮(通过特殊辊子实现全向移动)、以及全向舵轮(如瑞典轮),其中单舵轮和双舵轮(两个驱动舵轮搭配多个万向从动轮)是AGV中最常见的布局,能完美实现二维平面内的任意方向移动和零半径转弯。
- 核心性能指标:
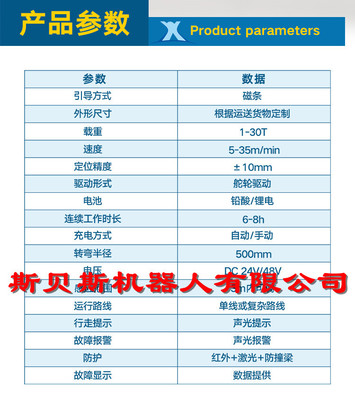
- 驱动性能:额定/峰值扭矩、速度范围、爬坡能力。
- 转向性能:转向精度、响应速度、最大转向角度(通常为±180°)。
- 可靠性:防护等级(IP评级)、耐久性、免维护周期。
三、 控制器与驱动舵轮的协同:闭环控制的艺术
二者的协同工作构成了一个精密的闭环控制系统:
- 指令下发:控制器根据导航算法计算出当前时刻每个驱动舵轮的目标线速度(v)和目标转向角(θ)。
- 驱动执行:驱动舵轮接收指令,其内部的电机控制器(通常为伺服驱动器)驱动电机快速、精确地达到目标速度和角度。
- 实时反馈:舵轮上的编码器将实际的速度和角度值实时反馈给机器人控制器。
- 纠偏调整:控制器比较目标值与实际反馈值,通过PID等控制算法计算出调整量,再次下发修正指令,如此循环往复,形成一个闭环,确保机器人能够沿着预定轨迹平稳、精确地运动,即使在地面不平或有轻微滑移的情况下也能保持稳定。
四、 选型与应用考量
在设计或选用机器人移动平台时,需综合考虑:
- 运动需求:是否需要全向移动?对转弯空间、路径精度有何要求?
- 负载与工况:机器人自重与载重多少?运行于平坦车间还是粗糙户外?
- 控制复杂度:控制器的算力能否支持多舵轮协同的复杂解算?通信接口(CAN、EtherCAT等)是否匹配?
- 成本与可靠性:高性能的伺服舵轮和控制器成本较高,需在性能和预算间取得平衡。
###
机器人控制器与驱动舵轮是移动机器人“能动”且“智能”的根本。控制器的智能化程度决定了机器人的“智商”上限,而驱动舵轮的性能与可靠性则决定了其“体能”下限。两者技术的不断进步与深度融合,正推动着机器人从执行固定路线的“自动导引车”向能够自主适应复杂动态环境的“智能移动机器人”飞跃,为柔性制造、智慧物流打开更广阔的空间。未来的发展趋势将是更深度的一体化设计,即“控制驱动一体化”,实现更紧凑的结构、更低的延迟和更高的系统可靠性。
如若转载,请注明出处:http://www.hfzhilun.com/product/23.html
更新时间:2026-06-06 22:42:59