焊接机器人全位姿作业演示 舵轮驱动下的空间灵活性探索

随着工业自动化技术的飞速发展,焊接机器人已成为现代制造业,特别是汽车、船舶、重型机械等领域的关键装备。传统焊接机器人多基于固定基座或直线导轨运行,其工作范围往往受限于机械结构。搭载先进驱动系统的移动焊接机器人,尤其是采用舵轮驱动方案的机器人,正在突破空间限制,实现全位置、多姿态的灵活焊接作业。本次演示的核心,正是展现一台由舵轮系统驱动的焊接机器人,如何在复杂的三维空间内精准、稳定地完成各种位置的焊接任务。
一、 演示系统概述:舵轮驱动的核心优势
演示系统主要由以下几部分构成:
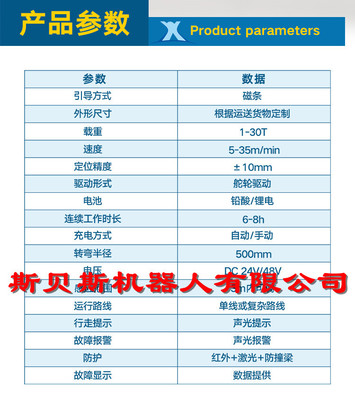
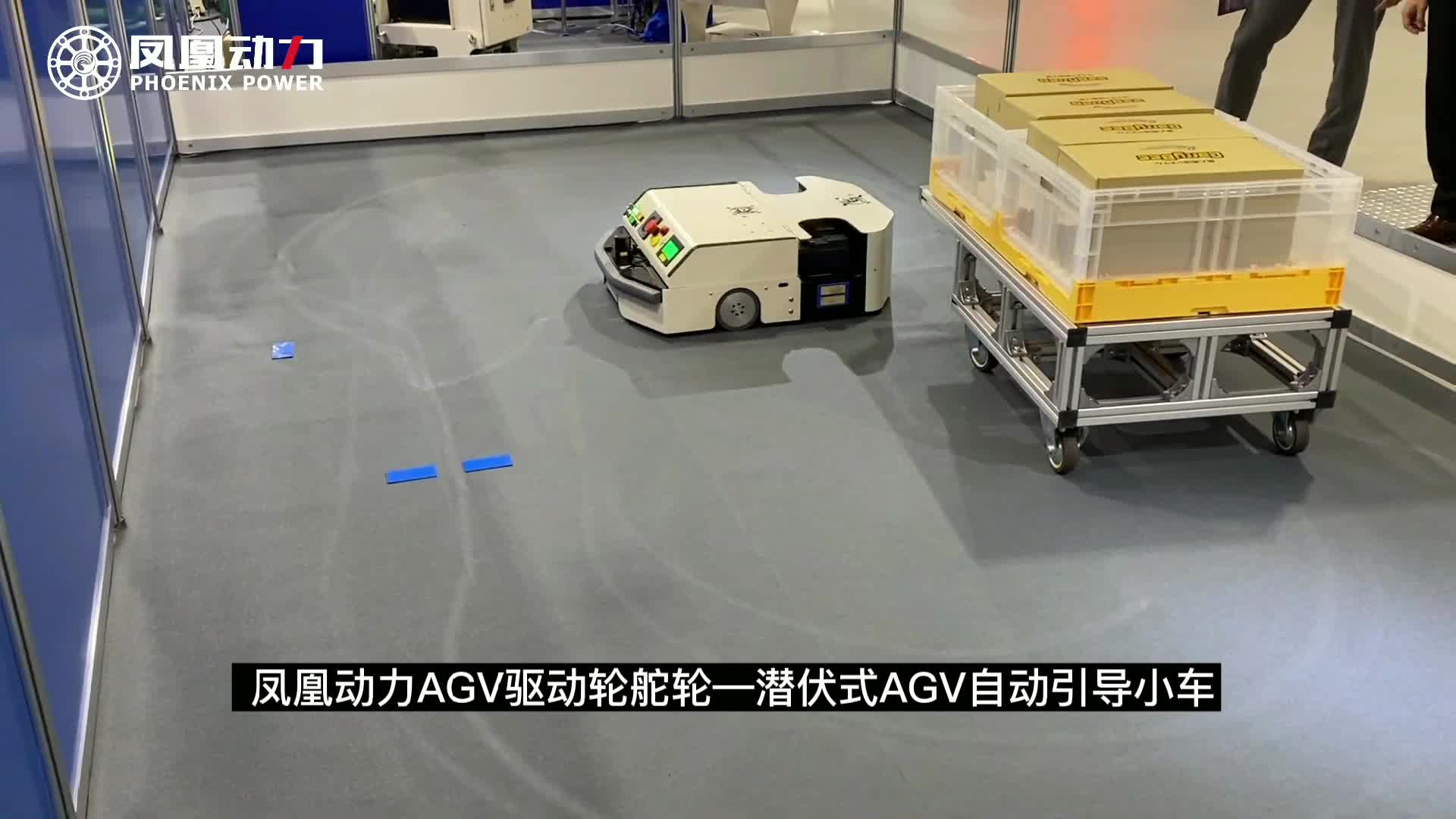
- 移动平台与驱动系统:机器人本体安装在一个具备全向移动能力的AGV(自动导引车)平台上。该平台的核心是多组独立控制的舵轮。舵轮集成了驱动、转向和承载功能于一体,能够实现平台的前进、后退、横向平移、原地旋转以及任意方向的复合运动,且转弯半径极小甚至为零。这种驱动方式为机器人提供了前所未有的移动自由度。
- 焊接机器人本体:通常为六轴或更多关节的工业机器人手臂,末端搭载高性能焊枪。其本身具有高度的运动灵活性和重复定位精度。
- 集成控制系统:将移动平台的运动控制、机器人的轨迹规划、焊接参数(电流、电压、速度)控制以及传感器反馈(如视觉、激光跟踪)整合在一个统一的智能控制系统中,实现协同作业。
舵轮驱动的核心优势在于其全向移动能力和高灵活性。与传统的差速轮或履带驱动相比,舵轮驱动的平台无需为转向预留巨大空间,可以在狭窄、复杂的现场环境中灵活穿梭,并轻松调整自身位姿,使机器人手臂始终处于最佳的焊接起始位置和姿态。
二、 全空间位置焊接演示场景
演示将模拟几个典型的高难度焊接场景,展示机器人的卓越性能:
- 平焊与横焊:机器人移动至工件侧面,这是最基础的演示。舵轮平台可进行微调,确保焊枪与焊缝保持最佳距离和角度。
- 立焊演示:面对竖直方向的焊缝,舵轮平台可以精确地横向移动,配合机器人手臂的协调运动,使焊枪沿垂直方向稳定上行或下行,有效克服熔池重力下淌的难题,保证焊缝成型质量。
- 仰焊挑战:这是手工焊接和传统固定机器人最困难的 position。演示中,舵轮平台可将机器人整体移动至工件下方。通过平台的升降机构(如有)或机器人手臂自身的伸展,使焊枪从下向上进行焊接。舵轮的稳定性和精准定位能力,确保了在反重力状态下焊接过程的极度平稳。
- 复杂三维曲线焊缝:例如管道相贯线、异形结构件的空间曲线焊接。舵轮平台可以沿一条预设的复杂路径连续运动,同时机器人手臂进行同步的、高动态的姿态调整,使焊枪始终垂直于焊缝切线,实现高质量的三维轨迹焊接。这充分体现了移动平台与机器人手臂“动-动”协调的尖端控制能力。
- 多工件、大范围作业:演示机器人从一个工位焊接完成后,自主导航至下一个远距离工位继续作业。舵轮驱动的移动性彻底打破了单个机器人工作范围的物理界限,实现了“一机多用”和柔性生产。
三、 技术实现与挑战
实现上述演示的关键技术包括:
- 高精度同步控制:移动平台的运动与机器人手臂的运动必须毫秒级同步,任何不同步都会导致焊枪轨迹偏差。这需要强大的实时运动控制算法。
- 绝对定位与路径规划:结合激光SLAM(同步定位与建图)、视觉标记或二维码等技术,机器人在车间内需实现厘米级甚至毫米级的绝对定位,并能规划出从A点到B点的最优无碰撞路径。
- 焊缝实时跟踪与自适应:利用激光视觉传感器,实时检测焊缝位置和坡口形状的变化,并动态调整机器人的轨迹和焊接参数,以应对工件的装配误差和热变形。
- 系统稳定性与安全:在移动和焊接过程中,必须确保整个系统的机械稳定性和电气安全性,包括防碰撞、急停、电弧防护等。
四、 应用前景与
本次焊接机器人在各种空间位置进行焊接的演示,生动展现了舵轮驱动技术为焊接自动化带来的革命性变化。它使得机器人不再是固定在生产线上的一点,而是转变为可以在车间内自由行走、适应各种复杂工况的“焊接工匠”。
这种解决方案特别适用于:
- 大型结构件焊接:如船体、桥梁、储罐、工程机械框架,这些工件巨大且焊缝位置多变。
- 小批量、多品种柔性生产线:快速切换不同工件,减少专用工装夹具。
- 恶劣或危险环境:可替代人工进入有限空间、高温或有毒环境作业。
总而言之,舵轮驱动的焊接机器人代表了未来智能焊接装备的重要发展方向。它将移动机器人的灵活性与焊接机器人的精密性完美结合,通过本次演示,我们清晰地看到了其在提升焊接质量、生产效率、自动化程度以及降低工人劳动强度方面的巨大潜力,为工业制造向更柔性、更智能的方向发展提供了坚实的技术支撑。
如若转载,请注明出处:http://www.hfzhilun.com/product/13.html
更新时间:2026-06-18 23:22:47