多传感数据融合技术在智能割草机器人自动返回与驱动舵轮协同控制中的应用
随着智能家居与智慧园林的快速发展,智能割草机器人正逐步成为现代庭院维护的核心工具。其中,自主工作完成后安全、精准地返回充电桩(即“自动返回”功能),是实现其完全自主化的关键一环。这一复杂任务高度依赖于环境感知、定位导航与运动控制的协同,而多传感数据融合技术正是实现这一协同,并确保机器人高效、稳定运行的核心。
一、 自动返回功能的挑战与多传感器需求
智能割草机器人的自动返回功能,绝非简单的“原路返回”。它面临几大核心挑战:
- 精确定位:在非结构化的庭院环境中,机器人需时刻知晓自身相对于固定充电桩的准确位置。
- 路径规划与重规划:庭院中可能存在临时障碍(如儿童玩具、宠物),返回路径需动态避开。
- 鲁棒性与容错:在部分传感器受干扰(如GPS信号弱、视觉特征变化)时,系统仍需可靠工作。
单一传感器无法应对所有挑战。因此,现代智能割草机器人通常集成多种传感器:
- 卫星定位模块(如GPS/RTK):提供全局绝对位置信息,但易受天气、遮挡影响,精度有限。
- 惯性测量单元(IMU):提供高频率的加速度、角速度信息,用于计算短时位移和姿态,但存在累积误差。
- 视觉传感器(摄像头):识别充电桩上的视觉信标(如特定图案、红外灯)或环境特征,进行相对定位和导航。
- 超声波/红外/激光雷达(LiDAR):用于近距离障碍物检测和避碰,保障返回途中的安全。
- 里程计(通常来自驱动轮编码器):通过测量轮子转速推算位移(航位推算),成本低但易受打滑影响。
二、 多传感数据融合的实现架构
为实现自动返回,上述传感器数据需通过融合算法整合成一个统一、可靠、高精度的状态估计。主流架构通常采用基于滤波的融合方法(如卡尔曼滤波及其变种扩展卡尔曼滤波EKF、无迹卡尔曼滤波UKF)。其工作流程如下:
- 初始化与全局定位:机器人启动或完成任务时,首先利用GPS或预先构建的环境地图(通过SLAM技术)进行粗定位,确定自身与充电桩的大致方位和距离。
- 传感器数据预处理与特征提取:
- 摄像头实时捕捉图像,通过计算机视觉算法识别充电桩信标,计算出机器人与充电桩的相对角度和距离。
- IMU数据经滤波后,提供精确的姿态(俯仰、横滚、偏航)和短时运动变化。
- 里程计数据提供基础的位移增量。
- 避障传感器持续扫描前方路径。
3. 多源数据融合与状态估计(核心):
以扩展卡尔曼滤波(EKF) 为例,它将机器人的状态(位置、速度、姿态)建模为一个动态系统。
- 预测步骤:利用IMU和里程计的数据(作为系统输入)预测机器人下一时刻的状态。IMU弥补了里程计在高动态运动(如转弯)时姿态估计的不足,里程计则帮助校正IMU的漂移。
- 更新步骤:当GPS信号可用或摄像头识别到充电桩时,将这些绝对或相对观测信息与预测状态进行比较,计算卡尔曼增益,从而最优地修正预测状态,显著抑制单一传感器的误差。例如,当进入GPS信号盲区(如树下),系统可依赖视觉+IMU+里程计的组合持续高精度定位。
4. 路径规划与运动控制:
融合后得到的精确位姿信息,输入到路径规划模块。规划器(如基于栅格地图或采样的算法)生成一条无碰撞的、平滑的返回路径。当避障传感器检测到临时障碍时,规划器会进行局部重规划,绕开障碍后重新回归主路径。
三、 融合数据与驱动舵轮的协同控制
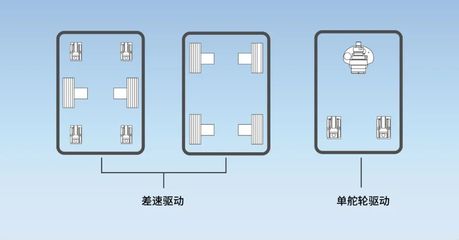
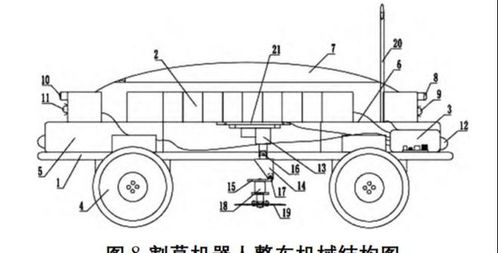
生成的路径是一系列目标点或目标姿态。驱动舵轮(通常是差速驱动或全向轮结构)的执行控制,是自动返回的“最后一公里”。
- 运动学控制:控制器(如PID控制器)根据融合定位提供的实时位姿与路径跟踪误差(横向偏差、角度偏差),计算出左右驱动轮的目标速度或舵轮转向角。
- 闭环反馈:驱动轮上的编码器(里程计)将实际执行的速度、转角信息反馈给控制系统,形成一个闭环。这个反馈数据同时也会被送入前述的多传感器融合滤波器,作为状态预测的重要输入,实现了感知与执行的深度耦合。
- 抗打滑与容错:当融合系统检测到位移估计(来自视觉/GPS)与里程计推算出现较大不一致时(可能发生轮子打滑),可以识别出打滑事件,并及时用其他传感器信息进行校正,防止控制指令基于错误位置而产生,确保机器人即使在小范围打滑后仍能准确驶向充电桩。
四、 与展望
在智能割草机器人中,自动返回功能是一个典型的“感知-决策-控制”一体化应用。多传感数据融合技术通过算法层面对冗余、互补的传感器信息进行优化整合,生成了远超任何单一传感器的、稳定可靠的定位与环境感知结果。这一结果不仅直接服务于全局和局部的路径规划决策,更通过闭环控制与驱动舵轮的执行机构无缝衔接,最终实现了从庭院任意位置到充电桩的精准、平滑、安全的自动返回。随着传感器成本降低、算力提升以及更先进的融合算法(如基于因子图优化、深度学习融合)的应用,这一过程的智能化、自适应性和可靠性将得到进一步提升。
如若转载,请注明出处:http://www.hfzhilun.com/product/18.html
更新时间:2026-06-18 05:16:09