AGV轮边驱动与机器人驱动舵轮中的减速机选型与应用

随着自动化物流和移动机器人技术的飞速发展,自动导引运输车(AGV)和各类服务机器人、工业机器人的应用日益广泛。其中,作为核心驱动单元的“轮边驱动”和“机器人驱动舵轮”对减速机的性能提出了极高要求。减速机在此类应用中扮演着至关重要的角色,它不仅需要传递动力、降低电机转速、增大输出扭矩,还需要具备高精度、高效率、高可靠性和紧凑的结构。本文将探讨在这两种典型应用场景中,主要会用到哪些类型的减速机。
一、AGV轮边驱动中的减速机选型
AGV的轮边驱动系统通常要求驱动单元高度集成、结构紧凑、响应迅速且能承受一定的冲击负载。常见的减速机类型包括:
- 行星减速机:这是AGV轮边驱动中最主流的选择之一。其优点在于结构紧凑、轴向尺寸小、承载能力高、传动效率高(通常可达97%以上)、传动比范围广。行星齿轮的多齿啮合带来了高刚性和高扭矩密度,非常适合空间受限但对动力要求较高的AGV驱动轮。精密型行星减速机还能提供较低的背隙,满足一些对定位精度有要求的AGV应用。
- 谐波减速机:以其极高的传动精度(单级传动精度可达1弧分以内)、大传动比、体积小、重量轻、无背隙等突出优点,在对运动控制精度要求极高的高端AGV(如精密装配、半导体车间用AGV)轮边驱动中有所应用。但其承载能力和抗冲击性相对行星减速机稍弱,且成本较高。
- 蜗轮蜗杆减速机:具有单级传动比大、结构紧凑、自锁功能(特定蜗杆头数下)等优点。在过去的一些AGV设计中曾有应用,但其传动效率相对较低(通常为70%-90%),容易发热,在追求节能和高效运行的现代AGV中应用比例有所下降,但在一些需要自锁功能防止溜车的特定场景中仍有价值。
- 精密摆线针轮减速机(RV减速机的一种简化或相关类型):具有高刚性、高扭矩、高精度和长寿命的特点。虽然不如行星减速机普遍,但在一些中重型AGV的驱动轮中,为了获得更大的输出扭矩和更高的可靠性,也会考虑选用摆线或RV结构减速机。
二、机器人驱动舵轮中的减速机选型
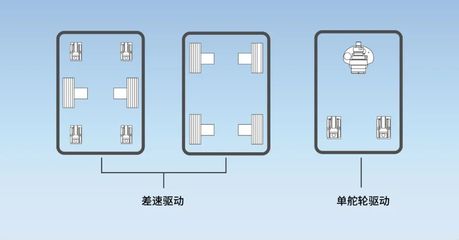
机器人驱动舵轮(尤其是全向移动机器人用的麦克纳姆轮或全向轮的总成,以及集成转向和驱动的舵轮)对减速机的要求更为严苛,通常需要驱动单元具备“驱动”和“转向”两套运动系统,且要求响应快、控制精确。
- 精密行星减速机:同样是驱动部分的主流选择。用于驱动电机后,提供机器人移动所需的高扭矩。其高效率和紧凑性对于续航和空间布局至关重要。在转向部分,对于需要精确定位的转向电机,也会使用小型精密行星减速机来增大扭矩并提高控制分辨率。
- 谐波减速机:在对转向角度精度要求极高的机器人舵轮转向机构中应用广泛。其“零背隙”或极小背隙的特性,使得机器人的轮子转向能够被精确控制,从而实现精准的全向移动和点位停靠。在驱动部分,一些高性能机器人为了追求极高的运动平稳性和精度,也会采用谐波减速机。
- RV减速机:这是中大型工业机器人关节的“标配”,以其极高的刚性和扭矩承载能力著称。在大型、重载的移动机器人(如重型AGV、户外巡检机器人)的驱动舵轮中,当对输出扭矩和抗冲击能力有极端要求时,RV减速机是驱动部分的理想选择。其高精度和高刚性也保证了在重载下的运动稳定性。
- 平行轴齿轮减速机:在一些结构设计相对传统、对成本敏感且空间允许的机器人驱动轮中,也会使用平行轴齿轮减速机。其技术成熟,成本较低,但体积和重量通常大于同规格的行星减速机。
与趋势
无论是AGV轮边驱动还是机器人驱动舵轮,减速机的选型都是一个综合权衡的过程,需要平衡精度、扭矩、效率、体积、重量、成本、寿命和可靠性等多方面因素。
目前,行业呈现出以下趋势:
- 高度集成化:将电机、减速机、编码器、制动器甚至驱动器集成在一起的“一体化驱动轮”或“驱动模组”越来越流行,这要求减速机设计必须高度紧凑,便于集成。
- 精密化与高效率:随着对机器人移动精度和节能要求的提高,高精度、低背隙、高效率的行星减速机和谐波减速机的应用更加普遍。
- 定制化设计:为适应不同机器人的独特结构布局和性能需求,与减速机厂商合作进行定制化开发(如特定的法兰接口、轴型、尺寸微调)已成为常态。
因此,在实际项目中,行星减速机凭借其优异的综合性能成为应用最广泛的解决方案;而在对精度有极致要求的转向或高端驱动场景,谐波减速机占据重要地位;在重载、高刚性需求的场合,RV减速机则显示出不可替代的优势。
如若转载,请注明出处:http://www.hfzhilun.com/product/15.html
更新时间:2026-06-18 14:37:48